Graph Storage Structures
- 若要在系統中表示一個圖形,需要儲存兩個集合:
- 圖形的頂點 (
Vertices) - 圖形的邊 (
Edgesor arcs )
- 圖形的頂點 (
- 常用的表示方式:
- Adjacency Matrix ( 相鄰矩陣 )
- Adjacency List ( 相鄰串列 )
- Multiple Adjacency List ( 相鄰多元串列 )
- Index Array ( 索引陣列 ) # Adjacency Matrix (相鄰矩陣) ## 無向圖 G = (V, E) 為一無向圖,|V| = n。宣告一個 n × n 的二維矩陣 A,其中: \[\begin{equation} A[i, j] = \begin{cases} 0, & if \; (V_i, V_j) \notin E \\ 1, & if \; (V_i, V_j) \in E \end{cases} \end{equation}\]
範例: 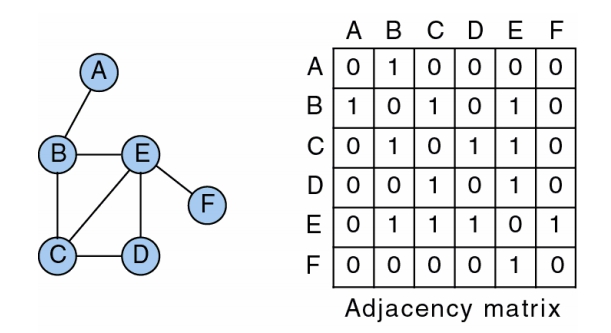
特質
此 Matrix 必為對稱 (Symmetric)
∵ 無向圖中,
運作
- 判斷邊
是否存在? - 做法:檢査
A[i, j]的値是否為 1 - 時間複雜度:
O(1)
- 做法:檢査
- 求頂點
的分枝度? - 做法:求第 i 列或第 i 行之元素値總和
- 時間複雜度:
O(n)(∵ 需用一個迴圈)
- 求圖形的邊數?
- 做法: \[\begin{equation} e = \sum_{i=1}^n \frac{D_i}{2} = \sum_{i=1}^n \sum_{j=1}^n \frac{A[i, j]}{2} \end{equation}\]
- 時間複雜度:
有向圖
G = (V, E) 為一有向圖,|V| = n。宣告一個 n × n 的二維矩陣 A,其中: \[\begin{equation} A[i, j] = \begin{cases} 0, & if \; (V_i, V_j) \notin E \\ 1, & if \; (V_i, V_j) \in E \end{cases} \end{equation}\]
範例: (以 Out-degree 為主) 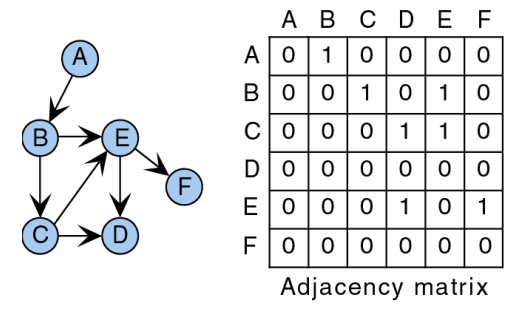
圖中列為 Outdegree,行為 Indegree
特質
此 Matrix 不一定是對稱 (Symmetric)
∵ 有向圖中,
運作
- 判斷邊
是否存在? - 做法:檢査 A[i, j] 的値是否為 1 (同無向圖)
- 時間複雜度:
O(1)
- 求頂點
的出分枝度與入分枝度? (若矩陣是以 Out-degree 為主) - 做法:
- Out-degree:求第 i 列之元素値總和
- In-degree:求第 i 行之元素値總和
- 時間複雜度:
O(n)(∵ 需用一個迴圈)
- 做法:
- 求圖形的邊數?
- 做法: \[\begin{equation} e = \sum_{i=1}^n D_i^{Out} = \sum_{i=1}^n D_i^{In} = \sum_{i=1}^n \sum_{j=1}^n A[i,j] \end{equation}\]
- 時間複雜度:
Adjacency List (相鄰串列)
無向圖
若 G = (V, E) 為一無向圖,|V| = n 且 |E| = e,則需使用 n 條相鄰串列與一個 Size 為 n 的一維矩陣 A[1, …, n],其中 A[i] 所存放的是頂點 i 的相鄰串列,此串列中毎個 Node 皆記録著與頂點 i 相鄰之其它頂點 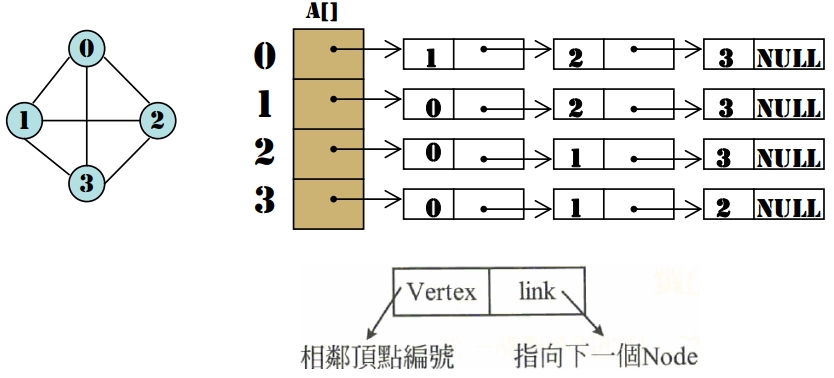
特質
- 在無向圖中,相鄰串列的 Node 總數 = 2e (
)
∵ 無向圖中,
運作
- 判斷邊
是否存在? - 做法: 檢査頂點為 i 的相鄰串列中,是否有 Node j 存在。(Yes: 存在, No: 不存在)
- 時間複雜度:
O(e)(∵ 與相連的邊之個數有關,∴ 比相鄰矩陣花時間)
- 求頂點
的分枝度? - 做法:求頂點 i 之相鄰串列的長度 (即:節點總數)
- 時間複雜度:
O(e)
- 求圖形的邊數?
- 做法: \[\begin{align} e &= \sum_{i=1}^n \frac{D_i}{2} \\ &= \sum_{i=1}^n \frac{\text{頂點 i 之相鄰串列長度}}{2} \\ &= \frac{\text{所有串列之節點總數}}{2} \end{align}\]
- 時間複雜度:
O(n + e)
- 時間複雜度 O(n + e) 的進一歩分析:
當圖形的邊很少的情況: 一個無向圖可以保持連通的最少邊數為 e = n-1。因此,O(n+e) = O(2n-1) ≒ O(n)當圖形的邊很多的情況:一個擁有最多邊數的圖形是完整圖 (Complete Graph),即:。因此, 由上述兩種情況分析,當圖形的邊很多的情況,使用相鄰串列來求圖形的邊數不見得比相鄰矩陣有利。然而,時間複雜度雖然可能會與相鄰矩陣相同,但是相鄰串列在資料結構上多存放了 link ,需要更多的記憶體空間來執行
有向圖
若 G = (V, E) 為一有向圖,|V| = n 且 |E| = e,則需使用 n 條相鄰串列與一個 Size 為 n 的一維矩陣 A[1, …, n],其中A[i] 所存放的是頂點 i 的相鄰串列,此串列中毎個 Node 皆記録著與頂點 i 相鄰之其它頂點
範例:: (以Out-degree為主) 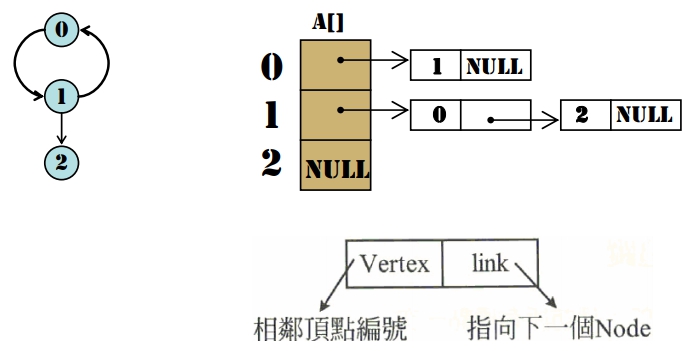
特質
在有向圖中,相鄰串列的 Node 總數 = e ∵ 有向圖中,
運作
- 判斷邊
是否存在? - 做法: 檢査頂點為 i 的相鄰串列中,是否有 Node j 存在。(Yes: 存在, No: 不存在)
- 時間複雜度:
O(e)(∵ 與相連的邊之個數有關)
- 求頂點
的分枝度? - Out-degree:求頂點 i 之相鄰串列的長度 (即:節點總數;時間複雜度:
O(e)) - In-degree: 檢査所有串列,統計 Node i 出現的次數 (時間複雜度:
O(n+e))
- Out-degree:求頂點 i 之相鄰串列的長度 (即:節點總數;時間複雜度:
- 求圖形的邊數?
- 做法: \[\begin{align} e &= \sum_{i=1}^n D_i \\ &= \sum_{i=1}^n \text{頂點 i 之相鄰串列長度} \\ &= \text{所有串列之節點總數} \end{align}\]
- 時間複雜度:
O(n + e)
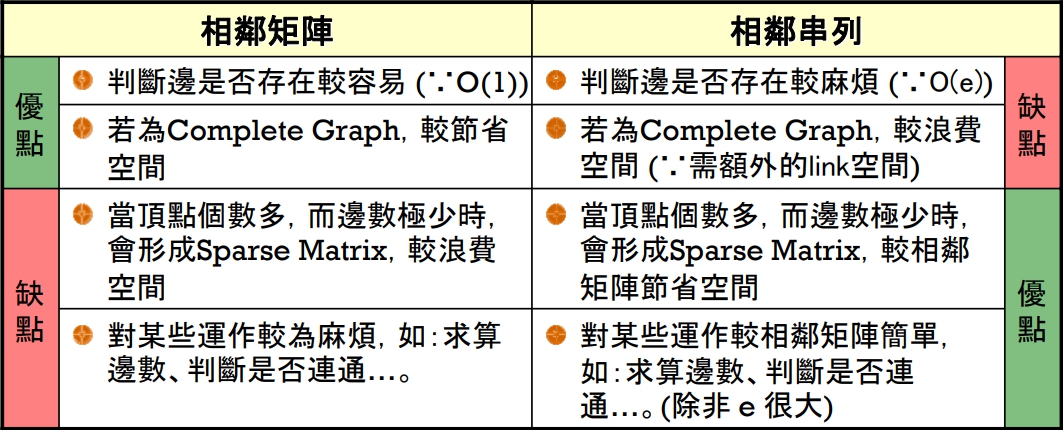
相鄰矩陣與相鄰串列的 比較